
Dr. A Malarkodi, SPC Chair OCEANS 2022 Chennai, Dr. Shyam Madhusudhana, OES Student Poster Competition Chair

The Student Poster Competition (SPC) is a flagship event of the MTS/OES OCEANS conferences in which undergraduate and graduate students from colleges and universities around the world participate. The SPC at OCENS 2022 Chennai received 52 submissions from around the globe, out of which 19 were selected for the participation in the final program following rigorous reviews by professionals in the field (finally, 17 students participated). This edition of the SPC was financially supported by a generous grant from the Office of Naval Research-Global. The monetary awards for this SPC were supported by Schmidt Ocean Institute and National Oceanic and Atmospheric Administration. We thank the sponsors for their continued support.

All selected participants were asked to present their posters in three sessions online. First two sessions were conducted on the 22nd of February, 2022. In this session, 11 posters were presented out of 13. On the 23rd of February, 2022, 5 posters were presented out of 6 posters including two in-person participants. We had a panel of eminent juries consisting of Professor V. Sundar, Emeritus professor as chair along with Prof. Asokan Thondiath, Dr. Vedachalam and Dr. Muthuvel . Winning participants were announced during the Gala Dinner on the 23rd of February, 2022. The prize money associated with the awards were arranged to be sent to the winners by Schmidt Ocean Institute through MTS. This year, a new award category was introduced — the top scored poster from among the host country participants was chosen and a special prize, sponsored by LOC, OCEANS 2022 Chennai, was awarded.
SPC participants with their affiliation, poster title and abstracts are given below.
First prize (Norman Miller Award) (Certificate and $ 3000)
 Yang Weng, The University of Tokyo, Tokyo, Japan
Yang Weng, The University of Tokyo, Tokyo, Japan
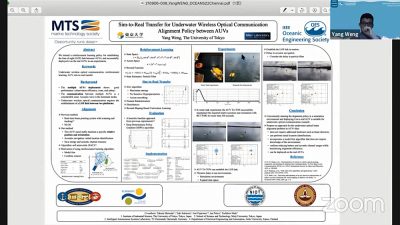
Sim-to-Real Transfer for Underwater Wireless Optical Communication Alignment Policy between AUVs
Abstract—The underwater wireless optical communication (UWOC) technology provides a potential high data rate solution for information sharing between multiple autonomous underwater vehicles (AUVs). In order to deploy the UWOC system on mobile platforms, It is proposed to solve the optical beam alignment problem by maintaining the relative position and orientation of two AUVs. A reinforcement learning based alignment policy is transferred to the real world since it outperforms other baseline approaches and shows good performance in the simulation environment. We randomize the simulator and introduce the disturbances, aiming to cover the real distribution of the underwater environment. Soft actor-critic (SAC) algorithm, reward shaping based curriculum learning, and specifications of the vehicles are utilized to achieve the successful transfer. In the Hiratsuka sea experiments, the alignment policy was deployed on the AUV TriTON and successfully aligned with autonomous surface vehicle BUTTORI. It demonstrates a solution for combining the UWOC technology and AUVs team in the ocean investigation.
Second Prize (Certificate and $2000)
 Zhiding Yang, Memorial University of Newfoundland, Canada
Zhiding Yang, Memorial University of Newfoundland, Canada
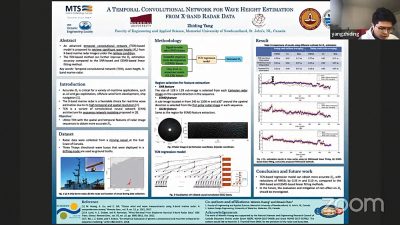
A Temporal Convolution Network for Wave Height Estimation from X-band Radar Data
Abstract—A state-of-the-art machine learning based significant wave height (Hs) estimation model, which is based on a Temporal Convolution Network (TCN), is proposed for X-band marine radar in this paper. The input space of the network is composed of three features (i.e., signal-to-noise ratio (SNR)-based, ensemble empirical mode decomposition (EEMD)-based, and gray level concurrence matrix based features) extracted from radar images. Two typical Hs estimation methods (i.e., SNR-based linear regression and EEMD-based linear regression methods) are utilized for comparison with the proposed method using the radar and buoy data collected at the East coast of Canada. It is found that the proposed method can generate the most accurate Hs results with a root-mean-square error of 0.24 m and a correlation coefficient of 0.94.
Third Prize (Certificate and $1000)
 Fabricio A. Bozzi, University of Algarve, Portugal
Fabricio A. Bozzi, University of Algarve, Portugal
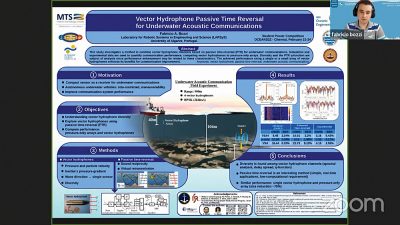
Vector Hydrophone Passive Time Reversal for Underwater Acoustic Communications
Abstract—The use of vector hydrophones as a receiver for underwater communications has been the subject of research since such a device is a compact option to pressure-only arrays. A vector hydrophone, usually called acoustic vector sensor, is a device that measures pressure and particle velocity components. This paper investigates a method to combine those channels based on passive time-reversal (PTR). Simulation and experimental data are used to quantify communication performance, comparing vector hydrophones to pressure-only arrays. The analyzed acoustic scenario consists of a shallow-water area (about 100 m), where a vector hydrophone array receives communication signals from a bottom moored source. Simulations help in the understanding of diversity by analyzing spectral characteristics of vector hydrophone channels and the PTR q-function. While in simulation, the benefits of PTR using particle velocity channels are perceptible seen by exploring diversity, communication performance with experimental data is degraded due to time varying. Finally, the achieved performance using a single or a small array of vector hydrophones enforces its benefits for communication enhancement.
Special Prize (Certificate and INR 25,000)
 Tata Nandini, Sri Sai Ram Engineering College, Chennai, India
Tata Nandini, Sri Sai Ram Engineering College, Chennai, India
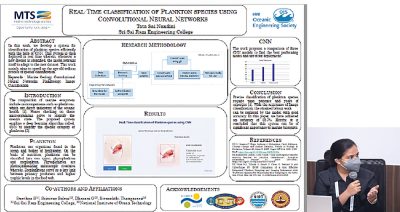
Real-Time classification of Plankton species using Convolutional Neural Networks
Abstract— Marine geology involves investigation of marine species for ocean observations. Marine geologists study the history, the processes occurring at the ocean floor to derive valuable insights about marine life. This study plays a vital role in maintaining balance in our ecosystem. The marine ecosystem houses species ranging from energy producers such as aquatic plants, phytoplanktons and consumers like fishes to humans. The study of one such marine species called “plankton” is known as planktology. Planktons are microscopic species that play a rather unnoticed, but a pivotal role in the marine food web. This leads to a need for a proper identification system which classifies different plankton species and also has a record of them which further helps in recognizing new plankton species. This system can also be used as a tool for classification of a particular plankton species with the help of Convolutional Neural Networks, which is a tedious process otherwise. This model is further deployed as a web app which can also allow authenticated users to contribute to the data collection of the model. Thus, this system will have a major impact on knowing different plankton species and also makes the subject of planktology more feasible.
 Ashutosh Rastogi, Indian Institute of Technology New Delhi, India
Ashutosh Rastogi, Indian Institute of Technology New Delhi, India
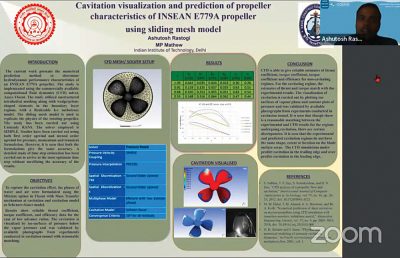
Cavitation visualization and prediction of propeller characteristics of INSEAN E779A propeller using sliding mesh model
Abstract— A Marine propeller is an ensemble of airfoil sections assembled in the form of a propeller blade. The pressure in the liquid adjoining to the body drops as the square of the local flow velocity as the propeller rotates. While the propeller rotates in water, the difference in stresses existing between the face and back of the propeller creates a thrust force in the forward direction, which lets it overcome the drag experienced by the vessel. Different methods are available to determine propeller performance, including experimental, theoretical and numerical. The open water propeller tests are conducted either in towing tanks/ circulating water channels to determine the non dimensional propeller parameters such as Thrust co-efficient and Torque co-efficient and though accurate in the model scale are cumbersome and costly. The Computational Fluid Dynamics (CFD) techniques provide a reliable and robust solution to this problem. The current work presents the numerical prediction method to determine hydrodynamic performance characteristics of an INSEAN E779A propeller. The study is implemented using the commercially available computational fluid dynamics (CFD) solver, Ansys Fluent. The study utilized unstructured tetrahedral meshing along with wedge/prism-shaped elements in the boundary layer regions, with a Realizable k-ɛ turbulence model. The sliding mesh model is used to replicate the physics of the rotating propeller. The study has been carried out using Unsteady RANS. The solver employed is SIMPLE. Studies have been carried out using both first order upwind and second order upwind for pressure, momentum and transient formulation. However, it is seen that both the formulations give the same accuracy. A detailed study of time step estimation has been carried out to arrive at the most optimum time step without sacrificing the accuracy of the results. To capture the cavitation effect, the phases of water and air were formulated using the Mixture option in Fluent with Mass Transfer mechanism at cavitation and cavitation model as Schenerr-Sauer model. Results show reliable thrust coefficient, torque coefficient, and efficiency data for the case of low advance ratios. The cavitation is visualized by iso-surfaces of pressure below the vapour pressure and was validated by available photographs from experiments conducted in a cavitation tunnel with “reasonable matching.”
 Rashi Srivastava, Central University of Karnataka, Karnataka, India
Rashi Srivastava, Central University of Karnataka, Karnataka, India
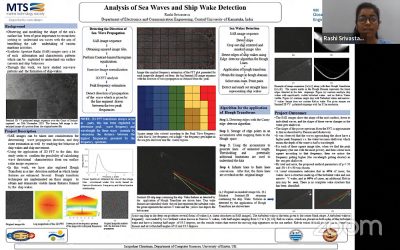
Analysis of Sea Waves and Ship Wake Detection
Abstract—Surface has been of great importance to the researchers seeking to understand the sea waves with the aim of benefitting the safe undertaking of various maritime activities. Synthetic Aperture Radar (SAR) images carry a lot of such information and characteristic patterns which can be exploited to understand sea surface currents and ship behaviors. Through this work, we have studied sea wave patterns and the formation of ship wakes. To retrieve the direction of sea currents from these radar images, algorithms based on 2D Fast Fourier Transform (Fast Fourier Transform) has been employed. SAR images can be taken into consideration for ship route estimation as well by studying the behavior of ship wakes and ship movement. Ship wakes have a pivotal role in the analysis of SAR images of a sea due to the volume of information which can be extracted through them. In this work, we have explored Hough Transform as a line detection method in which linear features are enhanced. Several Hough transform techniques are implemented on these images to obtain and demarcate visible linear features formed by the ship wakes. Each image point is mapped to detect parameterized shapes; hence, it reduces the possibility of detecting spatially spread patterns in the image. For the detection procedure ships containing tiles from the original images are tiled out. The proposed work has been experimented on Setinel-1B SAR images with multiple ships present in them. The results obtained show a fairly accurate detection performance. This study has been conducted on reliable radar data and several features of the sea waves and surface have been explored.
 Yuki Sekimori, The University of Tokyo, Tokyo, Japan
Yuki Sekimori, The University of Tokyo, Tokyo, Japan
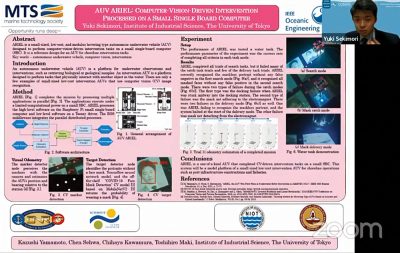
AUV ARIEL: Computer-Vision-Driven Intervention Processed on a Small Single-Board Computer
Abstract—ARIEL, a newly developed small-sized, low-cost, and modulus hovering type autonomous underwater vehicle, is designed to perform computer-vision-driven intervention tasks on a small single-board computer. The working prototype has demonstrated an underwater intervention mission and proved a functional system at the Underwater Robot Convention in JAMSTEC 2021. In the experiment trials, ARIEL performed the mission in the testing water tank. ARIEL is a reference design of an AUV for lightweight shoreline intervention tasks.
 Mark Ali, Jacobs University Bremen, Bremen, Germany.
Mark Ali, Jacobs University Bremen, Bremen, Germany.
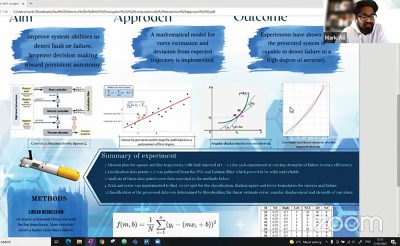
Fault Detection in AUV navigation: a computationally inexpensive approach
Abstract—This paper proposes a computationally inexpensive approach for fault detection during AUV navigation. Thruster performances may degrade over time, or a complete failure may occur. Considering that currently most of AUV missions are surveys involving long linear transits, this paper focuses on analysis of line segments and detection of navigation errors with varying thruster performances degradation, using linear approximation and curvature analysis. Those mathematical approaches have been chosen due to their computational efficiency, an important aspect for low-cost vehicles and for a service watch module, which needs to run in the background without competing for resources with mission-critical modules. Extensive tests have been run with the Sparus AUV at the University of Girona facilities and at sea, confirming the validity of the proposed approach.
 Yaomei Wang, Memorial University of Newfoundland, Canada
Yaomei Wang, Memorial University of Newfoundland, Canada
An experimental study of the cooperation between sonar and a fluorometer for detecting underwater oil from an underwater vehicle
Abstract— In oil spill events, using a combination of multiple types of sensors is favorable to improve the performance of oil detection and the reliability of data collected. An experiment was conducted to investigate the feasibility of using a fluorometer and a sonar to detect and
cross-validate the presence of spilled oil before being installed and used on a Slocum glider. Considering the limited payload capability and energy availability of a Slocum glider, a lightweight Cyclops submersible fluorometer and a Ping 360 sonar were used to cross-validate fluorescence measurements and sonar images. The results from the experiment conducted in a tank with oil release confirmed the feasibility of using both fluorometers and sonar to verify the existence of spilled oil.
 Lady Nicole Macas Mendez, Faculty of Maritime Engineering and Marine Sciences, Ecuador
Lady Nicole Macas Mendez, Faculty of Maritime Engineering and Marine Sciences, Ecuador
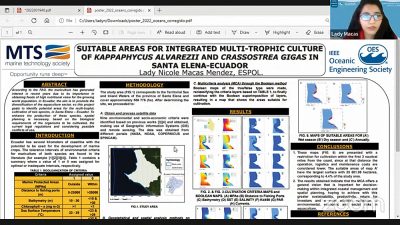
Investigation of Suitable Areas for Integrated Multi-Trophic Culture of Kappaphycus alvarezii and Crassostrea gigas in Santa Elena-Ecuador
Abstract—According to the Food and Agricultural Organization the mariculture has generated interest in recent years due to its importance in obtaining foods of high nutritional value for the growing world population. In Ecuador, the aim is to promote the diversification of the aquaculture sector, so this project goals to identify potential areas for the multi-trophic cultivation of Kappaphycus alvarezii and Crassostrea gigas, in Santa Elena – Ecuador. To enhance the production of these species spatial planning is necessary, based on the biological requirements of the organisms to be cultivated, the current legal regulations and considering possible conflicts of use. Nine environmental and socio- economic criteria were identified and obtained, making use of Geographic Information Systems (GIS) and remote sensing. Subsequently, the reclassification of these criteria was carried out based on the optimal cultivation ranges of both species, to finally continue with the Boolean superposition of layers, resulting in a map showing the areas suitable for cultivation. These results indicate that multi-criteria analysis offers an overview that is important for decision-making within integrated coastal management and spatial planning.
 Cesar A. Rojas, Florida International University, Miami, USA
Cesar A. Rojas, Florida International University, Miami, USA
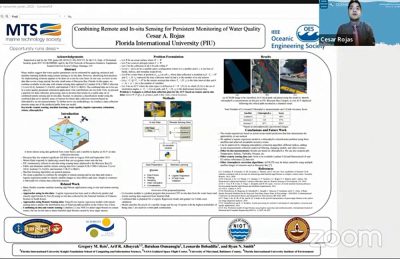
Combining Remote and In-situ Sensing for Persistent Monitoring of Water Quality
Abstract—Many studies suggest that water quality parameters can be estimated by applying statistical and machine learning methods using remote sensing or in-situ data. However, identifying best practices for implementing solutions appears to be done on a case-by-case basis. In our case, we have in-situ data that covers a large period, but only small areas of Biscayne Bay, Florida. In this paper, we combine available in-situ data with remote sensing data captured by Landsat 8 OLI-TIRS Collection 2 Level 2(L8), Sentinel-2 L2A(S2), and Sentinel-3 OLCI L1B(S3). The combined data set is for use in a water quality parameter estimation application. Our contributions are two-fold. First, we present a pipeline for data collection, processing, and co-location that results in a usable data set of combined remote sensing and in-situ data. Second, we propose a classification model using the combined data set to identify areas of interest for future data collection missions based on chlorophyll-a in-situ measurements. To further prove our methodology, we conduct a data collection mission using one of the predicted paths from our model.
 Paulo Padrao, Florida International University, Miami, USA
Paulo Padrao, Florida International University, Miami, USA
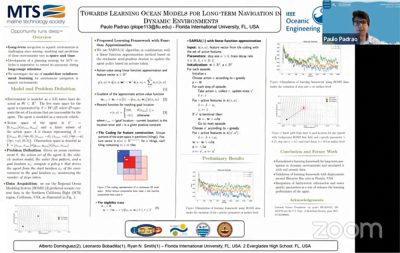
Towards Learning Ocean Models for Long-term Navigation in Dynamic Environments
Abstract—The use of underwater robot systems, including Autonomous Underwater Vehicles (AUVs), has been studied as an effective way of monitoring and exploring dynamic aquatic environments. Furthermore, advances in artificial intelligence techniques and computer processing led to a significant effort towards fully autonomous navigation and energy-efficient approaches. In this work, we formulate a reinforcement learning framework for long-term navigation of underwater vehicles in dynamic environments using the techniques of tile coding and eligibility traces. Simulation results used actual oceanic data from the Regional Ocean Modeling System (ROMS) data set collected in Southern California Bight (SCB) region, California, USA.
 Subodh Bhosale, Indian Institute of Technology Bombay, India.
Subodh Bhosale, Indian Institute of Technology Bombay, India.
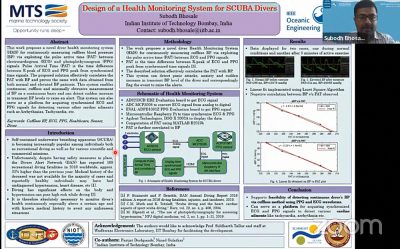
Design of a Health Monitoring System for SCUBA Divers
Abstract—This work proposes a novel diver health monitoring system (HMS) for continuously measuring cuffless blood pressure (BP) via exploiting the pulse arrive time (PAT) between electrocardiogram (ECG) and photoplethysmogram (PPG) signals. Pulse Arrival Time (PAT) is the time difference between ECG, R-peak and PPG peak from synchronized time signals. The proposed solution effectively correlates the PAT with BP and proves the same with data obtained from both normal and elevated BP patients. This system enables continuous, cuffless and minimally obtrusive measurement of BP on a continuous basis and can detect sudden increase in transient BP levels to raise an alert. This system can also serve as a platform for acquiring synchronized ECG and PPG signals for detecting various other cardiac ailments such as Arrhythmias, Tachycardia, etc.
 Fan Zhao, The University of Tokyo, Tokyo, Japan
Fan Zhao, The University of Tokyo, Tokyo, Japan
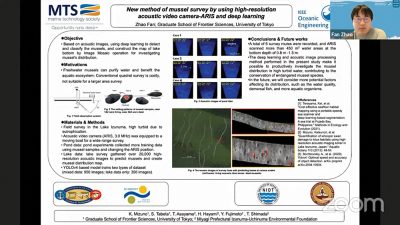
New method of mussel survey by using high resolution acoustic video camera-ARIS and deep learning
Abstract—Due to water transparency, water depth, and higher labor demand, conventional methods for the underwater survey (e.g., optical sensing and quadrat survey) have their limitations. Thus, to overcome these barriers, this paper proposes a method of acoustic sensing which uses the high-resolution acoustic video camera-ARIS to visualize the lake bottom and investigate the distribution of mussels. The New underwater sensing method produces near-video quality acoustic images for constructing the map by Image Mosaic Operation, which can be helpful for assessing the status of mussels. Convolutional Neural Network(CNN) shows its help in the detection and classification of mussels in this study. Meanwhile, the accuracy and efficiency of the well-trained deep learning model manage to improve this research. Through the field survey, the proposed method successfully obtained the distribution maps of mussels in Lake Izunuma.
 Sai Ganesh CS, Sri Sai Ram Engineering College Chennai, India
Sai Ganesh CS, Sri Sai Ram Engineering College Chennai, India
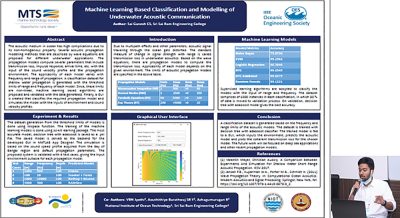
Machine Learning Based Classification and Modelling of Underwater Acoustic Communication
Abstract – The acoustic medium in the ocean has high complications due to its non-homogenous property. The speed of sound in the medium plays a significant role in acoustic computations and is more related to the density and compressibility of the propagation medium. Several acoustic propagation modeling methods that are described by wave equations are proposed for different underwater applications. The mathematical propagation models that are used widely are the empirical method (Thorp’s model), ray theory (Bellhop model), normal mode method (Kraken), wavenumber integration (Scooter), and parabolic equations (RAMGeo). The propagation models compute several parameters that include transmission loss, impulse response, arrival time, etc. with the input of the sound velocity profile and the transmission environment. The error rate of the propagation models varies with respect to the frequency, range of transmission and other parameters as well. In this paper, a classification dataset for shallow water propagation is generated with the threshold limits of range and frequency of each propagation model. Since, the limits of the propagation model are non-linear, machine learning based algorithms are proposed and validated with the data generated. Finally, a GUI is created that classifies the required propagation model and simulates the model with the inputs of range, frequency and sound velocity profiles.
 XiaoGang Li, Ocean University of China, China
XiaoGang Li, Ocean University of China, China
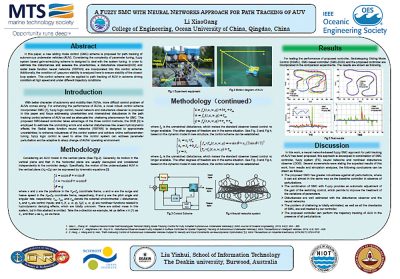
A new fuzzy SMC control approach to path tracking of autonomous underwater vehicles with mismatched disturbances
Abstract—This work proposed a new Sliding Mode Control (SMC) scheme for path tracking of autonomous underwater vehicles (AUV) with uncertainties and mismatched disturbances. Considering the complexity of parameter tuning, a fuzzy system based gain-scheduling scheme is designed to deal with the system tuning. In the control system, mismatched disturbances and uncertainties are estimated and assessed by disturbance observers (DOB) and Radial Basis Function Neural Networks (RBFNN), respectively. Additionally, the condition of Lyapunov stability is analyzed here to ensure the closed-loop stability of the control system. This control scheme can be applied to path tracking of AUV in different driving environments within fast changing trajectories. Finally, many comparative experiments have been conducted to show the favorable performance of the proposed controller.
 HaoDong Qi, Harbin Engineering University, China
HaoDong Qi, Harbin Engineering University, China
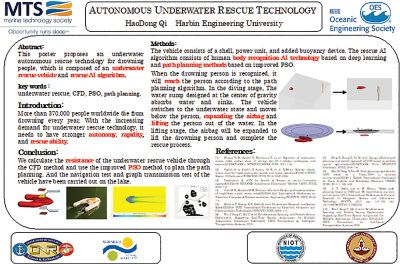
Autonomous Underwater Rescue Technology
Abstract—This paper proposes an underwater autonomous rescue technology for drowning people, which is composed of an underwater rescue vehicle and rescue AI algorithm. The vehicle consists of a shell, power unit, and added buoyancy device, which can help the drowning person from the underwater to the surface, and the power device can drive the vehicle to move. The rescue AI algorithm consists of human body recognition AI technology based on deep learning and path planning methods based on improved PSO. Also, this paper carries out numerical analysis on-resistance of the vehicle, simulates the path planning based on PSO, and tests several functions in the lake.
 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.