Shyam Madhusudhana, OES Student Poster Competition Chair,
Photos by Stan Chamberlain
The Student Poster Competition (SPC) is a flagship event of the MTS/OES OCEANS conferences in which students (both undergraduate and graduate) from colleges and universities around the world participate. Col. Norman Miller had created and implemented the first SPC in 1989 during the OCEANS conference in Seattle, Washington, and it has been a feature of OCEANS conferences ever since. It was befitting that the 30th anniversary of SPC had returned to Seattle. During each conference, typically about twenty students are selected from the pool of aspiring applicants, based on their submitted abstracts, to present a poster describing their work. The selected students’ travel, accommodation and conference registration are fully supported by the conference. In addition, monetary prizes are also awarded to the top three best presenters among the selected participants.
The second of this year’s SPCs was held during OCEANS 2019 Seattle at the Washington State Convention Center from the 27th to the 31th of October. The SPC program was funded by a grant from the Office of Naval Research (ONR), and we offer our sincere gratitude for their continued support. Preparations in the run-up to the event were ably managed by the local organizing committee (LOC), and in particular by Miles Logsdon who was the SPC chair on the LOC. Out of the 20 applicants that were shortlisted, four candidates had to withdraw due to different reasons, and we had 16 students presenting their work at the event.
The students put up their posters at designated slots on the Skybridge on October 28th. In this edition of the SPC, we had a total of 18 volunteers that offered to serve as judges. We understand that this commitment was an imposition on the judges’ conference schedules, and we deeply appreciate their dedication to encouraging the next generation of ocean scientists and engineers. To ease the load on students as well as the judges, the judging process was restricted to four short sessions spread over two days.
The participants and the judges were all gathered at the main stage on the morning of November 30th. Each participating student was awarded a Certificate of Attendance, and the judges’ efforts were acknowledged by presenting each of them a Certificate of Appreciation. The three top-ranked posters were announced and prizes were awarded.


The full list of 16 participants (including the prize winners) together with their affiliation, poster title and an abstract of their poster are given below.
First Prize, Norman Miller Award (Certificate & $3000 prize)

Bernardo Teixeira, INESC TEC, Portugal
Deep Learning Approaches Assessment for Underwater Scene Understanding and Egomotion Estimation
Abstract—This paper address the use of deep learning approaches for visual based navigation in confined underwater environments. State-of-the-art algorithms have shown the tremendous potential deep learning architectures can have for visual navigation implementations, though they are still mostly outperformed by classical feature-based techniques. In this work, we apply current state-of-the-art deep learning methods for visual-based robot navigation to the more challenging underwater environment, providing both an underwater visual dataset acquired in real operational mission scenarios and an assessment of state-of-the-art algorithms on the underwater context. We extend current work by proposing a novel pose optimization architecture for the purpose of correcting visual odometry estimate drift using a Visual-Inertial fusion network, consisted of a neural network architecture anchored on an Inertial supervision learning scheme. Our Visual-Inertial Fusion Network was shown to improve results an average of 50% for trajectory estimates, also producing more visually consistent trajectory estimates for both our underwater application scenarios.
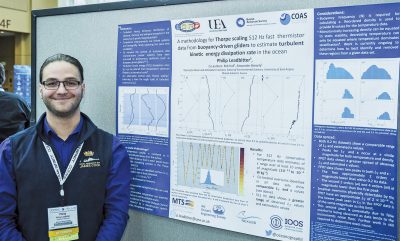 Second Prize (Certificate and $2000 prize)
Second Prize (Certificate and $2000 prize)
Philip Leadbitter, University of East Anglia, United Kingdom
A methodology for Thorpe scaling 512 Hz fast thermistor data from buoyancy-driven gliders to estimate turbulent kinetic energy dissipation rates in the ocean
Abstract—A Kongsberg Seaglider with a microstructure package was deployed in the Faroe-Shetland Channel in 2017 as part of the 4th Marine Autonomous Systems in Support of Marine Observations (MASSMO4). Using the FP07 fast thermistor (512Hz), the standard Seaglider thermistor (0.2 Hz) and potential density calculated from Seaglider conductivity-temperature sail (0.2 Hz) a comparison of the Thorpe Scale method has been made. Through this method turbulent kinetic energy (TKE) dissipation rates are inferred from the length-scale of a turbulent overturn. Comparison of the three physical quantities show that overturns with a comparable length-scale also have a comparable TKE dissipation rate. The range of estimated TKE dissipation rates from the 0.2 Hz data is also comparable to those inferred using the same method applied to potential density calculated from a ship mounted CTD.
 Third Prize (Certificate and $1000 prize)
Third Prize (Certificate and $1000 prize)
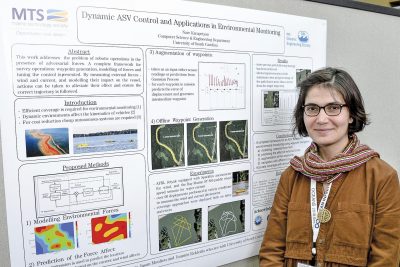
Nare Karapetyan, University of South Carolina, USA
Dynamic Autonomous Surface Vehicle Control and Applications in Environmental Monitoring
Abstract—This paper addresses the problem of robotic operations in the presence of adversarial forces. We presents a complete framework for survey operations: waypoint generation, modelling of forces and tuning the control. In many applications of environmental monitoring, search and exploration, and bathymetric mapping, the vehicle has to traverse in straight lines parallel to each other, ensuring there are no gaps and no redundant coverage. During operations with an Autonomous Surface Vehicle (ASV) however, the presence of wind and/or currents produces external forces acting on the vehicle which quite often divert it from its intended path. Similar issues have been encountered during aerial or underwater operations. By measuring these phenomena, wind and current, and modelling their impact on the vessel, actions can be taken to alleviate their effect and ensure the correct trajectory is followed.
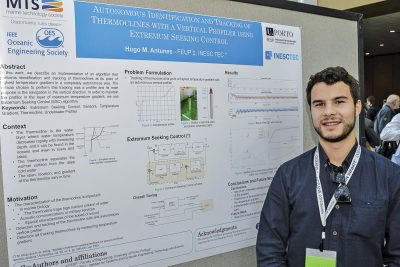 Hugo Antunes, University of Porto, Portugal
Hugo Antunes, University of Porto, Portugal
Autonomous Identification and Tracking of Thermoclines with a Vertical Profiler using Extremum Seeking Control
Abstract—The thermocline is a relatively narrow vertical region that separates the mixed layer at the surface from the deep-water layer. In this region, the gradient of temperature with respect to depth is higher than in the rest of the water column. The characteristics of the thermocline have strong impact in marine biology, since it may trap high-nutrient organisms, and it also affects sound propagation, with direct impact on underwater acoustic communications and military operations. Under adaptive sampling, Autonomous Underwater Vehicles are practical tools for efficient ocean observation. In this work, we describe an implementation of an Extremum Seeking Controller that performs identification and tracking of thermoclines at its point of highest temperature gradient in a completely autonomous way. The vehicle chosen to perform this tracking was an autonomous vertical profiler, and the algorithms were validated using both real and simulated data.
 Xinwei Chen, Memorial University of Newfoundland, Canada
Xinwei Chen, Memorial University of Newfoundland, Canada
Automatic Identification of Rain-contaminated Regions in X-band Marine Radar Images
Abstract—A self-organizing map (SOM) based method for identifying rain-contaminated regions in X-band marine radar images is proposed. The difference of texture and pixel intensity distribution between rain-contaminated and rain-free echoes is first exploited. A Gabor filter bank is designed to filter marine radar images and generate texture features. Bin values extracted from the localized histogram can represent pixel intensity features. Both types of features extracted from each pixel are combined into a feature vector and trained using an unsupervised neural network, SOM, which clusters pixels into rain-free and rain-contaminated types. Images collected from a shipborne marine radar in a sea trial off the east coast of Canada under rain conditions are utilized to validate the proposed method. Identification results generated from clustering show that the rain-contaminated pixels are effectively detected.
 Vincent Dupont, Université Laval, Canada
Vincent Dupont, Université Laval, Canada
A region growing algorithm adapted to bathymetric point clouds
Abstract—This project focuses on the extraction of plane surfaces and their uncertainty in a bathymetric point cloud. To do so, we propose the Region-Growing-Adapted-to-Bathymetry (RGAB) algorithm. Knowing where plane surfaces on the sea-bottom are is needed in calibration of MBES system. These surfaces are also involved in the computation of error estimators used to validate data acquired by ASV. With the RGAB algorithm, we propose several adaptations to classic region growing to be used with bathymetric point cloud. Indeed, we use a more robust PCA approach to extract local normal vectors and a raster-based analysis on the bathymetric DTM to get seed regions for all plane surfaces.
 Wonse Jo, Purdue University, USA
Wonse Jo, Purdue University, USA
Development of an Unmanned Surface Vehicle for Harmful Algae Removal
Abstract—In this paper, we introduce a small and low-cost unmanned surface vehicle (USV), the SMARTBoat 5, capable of removing harmful algal blooms (HABs), which are a rising environmental issue worldwide. The developed USV is a hovercraft type, operated by two propellers with duct fans; it is able to freely move even in shallow water and to approach shorelines. For eco-friendly, immediate, and safe control of algae, the USV is equipped with a novel water suction mechanism that enables it to actively collect algae without physical contact. In addition, it is equipped with a mesh net-based algae filter system that is easily disassembled and replaced. The USV system is supported by the Robot Operating System (ROS) for expandability and use in diverse applications. The performance of the proposed water suction mechanism and USV platform overall are validated through computational fluid simulation (CFD) and experiments in both lab and real environments.
 Patrick Kelley, Lake Superior State University, USA
Patrick Kelley, Lake Superior State University, USA
Detection of Oil Under Ice: An Acoustic Reverberation Method
Abstract—Through new exploration and aging infrastructure, there is an ever-increasing risk of oil spills or leaks into natural bodies of water, but presently there is no low-cost method to actively monitor for such spills under ice cover, particularly not any method giving rapid coverage of a large area. Therefore, a method based on acoustic reverberation time under the ice was investigated. A broadband, impulsive acoustic source generating a frequency band of 10–90 kHz was used in a water tank with a layer of naturally-grown ice for a scaled feasibility study of this method; this band provided appropriately short wavelengths, scaled for the small tank environment. Reflections from the tank walls were minimized, and a diffuse environment within the tank allowed for extraction of a reverberation time with a hydrophone. Results show an oil presence changed the reverberation time as compared to an oil-free ice layer across all diffuse frequency bands.
 Kevin Mack, Clarkson University, USA
Kevin Mack, Clarkson University, USA
Time-of-Flight (ToF) Cameras for Underwater Situational Awareness
Abstract—Recently developed commercial Time-of-Flight(ToF) cameras have been used to accurately and reliably measure scene depth with high resolution in applications such as automotive LiDAR. There is a desire to adapt this technology for applications in underwater environments. In this work, we establish a methodology for using modified commercial ToF cameras in turbid water. We express the need for hardware and software modifications to the camera and demonstrate initial results in the efficacy of the camera in an underwater test scenario. We include ToF camera imagery taken under a variety of water conditions to understand the performance limitations of this technology as a function of water clarity. Target detection results from preliminary laboratory test tank experiments are presented for two different classifiers, each of which achieves high accuracy for a certain range of water conditions.
 Curran Meek, University of Hawaii at Manoa, USA
Curran Meek, University of Hawaii at Manoa, USA
Fast Autonomous Underwater Exploration using a Hybrid Focus Model with Semantic Representation
Abstract—By combining complex exteroceptive perceptions, humans are able to seamlessly explore a new environment, build up their knowledge base, and “easily” identify novel objects or imminent hazards. This work aims at employing a similar intelligent cognition and exploration system for unmanned marine robots. The proposed system semantically discriminates the visual inputs of the robot’s environment by combining task-directed and stimulation-based focus to encode artificial “attention”, to enhance exploration decision making. Additionally, the hybrid focus model can use the semantic descriptors to label a target object (e.g., a certain type of coral) with metric information (e.g., geographical locations of the coral) from a range-and-bearing sensor, allowing a metric map to be generated with semantic labels of the desired types of objects. These maps can help simplify human and robot interaction by providing a clear semantic interpretation of the robots observations. The proposed system is implemented and tested on an indoor robot and with underwater images.
 Tamzidul Mina, Purdue University, USA
Tamzidul Mina, Purdue University, USA
A Novel Double Layered Weighted Potential Field Framework for Multi-USV Navigation towards Dynamic Obstacle Avoidance in a Constrained Maritime Environment
Abstract—Motion planning of multiple unmanned surface vehicles (USVs) towards increased autonomy and wider coverage of the maritime environment is a pertinent requirement. Given the numerous types of USVs currently available with a wide spectrum of maneuvering capabilities, we present a generalized multi-USV navigation framework adaptable to specific USV maneuvering response capabilities for dynamic obstacle avoidance. The present paper integrates an optimal path planning with safety distance constrained A* algorithm and a proposed adaptively weighted potential field based path following approach with collision avoidance based on USV maneuvering response times. The system allows USVs with fast maneuvering abilities to react late and slow USVs to react sooner to oncoming moving obstacles gradually such that a smooth path is followed by the USV group with reduced cross track error. Simulation results validate reduced cross track error for slow and fast maneuvering response time multi-USV teams.
 Benjamin Murphy, Dalhousie University, Canada
Benjamin Murphy, Dalhousie University, Canada
Lab-on-a-chip sensor for in situ nutrient monitoring
Abstract—Presented here is a low-cost in situ nutrient sensor based on lab-on-a-chip (LOC) technologies. A microfluidic chip with integrated check valves and a novel absorbance cell forms the backbone of the sensor. Using spectrophotometry to measure concentrations of nitrite and phosphate in liquid samples, effective limits of detection (LOD) of 30 nM and 100 nM are achieved for nitrite and phosphate respectively using a 10 mm optical path. The sensor was deployed in the Bedford Basin in Halifax, Canada for 12 hours for in situ phosphate measurement and analysis.
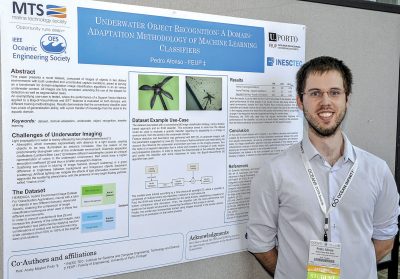 António Oliva Afonso, University of Porto, Portugal
António Oliva Afonso, University of Porto, Portugal
Underwater Object Recognition: A Domain-Adaption Methodology of Machine Learning Classifiers
Abstract—This paper presents a novel dataset, composed of images of objects in two distinct environments and both controlled and uncontrolled capture conditions, aimed at serving as a benchmark for domain-adaptation image classification algorithms in an air versus underwater context. All images are fully annotated, extending the use of the dataset for detection as well as segmentation tasks. An exemplifying use-case is tested, where the performance of a Support Vector Machine applied to a Bag-of-Visual-Words and SIFT features is evaluated on both domains, with different training methodologies. Results demonstrate that the conventional classifier used has a lack of generalization ability, with a poor transfer of knowledge from the aerial to the aquatic domain.
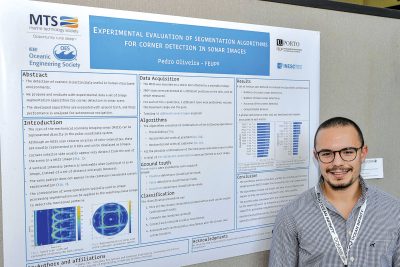 Pedro Oliveira, University of Porto, Portugal
Pedro Oliveira, University of Porto, Portugal
Experimental evaluation of segmentation algorithms for corner detection in sonar images
Abstract—Corners usually appear very distinct from the rest of the scene in a mechanical scanning imaging sonar (MSIS) image, generally characterized by sharp intensities. The detection of corners is particularly useful in human-structured environments such as tanks because the knowledge on their location provides a way to compute the vehicle position. The combination of some basic operations typically used for image segmentation have great potential to detect and localize corners in sonar images automatically. This article proposes and evaluates with experimental data a set of image segmentation algorithms for corner detection in sonar scans. The developed algorithms are evaluated with ground truth, and their performance is analyzed following a few relevant metrics for autonomous navigation.
 Yu Herng Tan, National University of Singapore, Singapore
Yu Herng Tan, National University of Singapore, Singapore
Design of a Morphable Multirotor Aerial-Aquatic Vehicle
Abstract—The design of any aerial-aquatic vehicle faces the unique challenge of vastly different fluid dynamics of air and water. Due to the demands of aerial propulsion, most existing solutions are fundamentally aerial vehicles with an auxiliary capability to operate underwater. Instead of using standard aerial platforms directly, we propose a novel morphable design for a multirotor-based vehicle inspired by the thruster layouts of regular aerial quadrotors and underwater remotely operated vehicles (ROVs). By adding the ability to rotate each motor about its respective arm, the proposed mechanical linkage allows for direct actuation in all six translation and rotational directions. The proposed concept is demonstrated in a proof of concept prototype and the details of the design and physical implementation are shown in this paper.
 Alejandro Torres, Florida International University, USA
Alejandro Torres, Florida International University, USA
Correlating Water Quality and Profile Data in the Florida Keys
Abstract—Aquatic ecosystems present complex structures susceptible to changes that can cause adverse effects in the water. These problems have turned the attention of researchers to understand them, and possibly take action to prevent further damages. This interest led to the accumulation of large amounts of data with limited personnel and resources to analyze it. An example of this is the collection of data in South Florida for 25 years by Florida International University. By making use of a depth profile and surface water quality data sets collected in the same location at the same time, a methodology is proposed to correlate these two data sets. By using Machine Learning, we represented depth profiles with coefficients followed by clustering analysis. Similarly, a water surface chemical dataset was clustered using k-means. We then used statistical methods to test the connection between these two data sets.
 Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems.
Suleman Mazhar has been working as a professor in Information & Communication Engineering at Harbin Engineering University (China) since July 2019. He did PhD from Tokyo University (Japan) and postdoctorate from Georgetown University (Washington DC, USA). He had BS-CS from FAST-NUCES (Lahore) and MS from GIK Institute (Pakistan). He is TYSP young scientist fellow (Ministry of Science & Technology China) and have won several research grants from international organizations such as DAAD (Germany), ICIMOD (Nepal), NRPU (Higher Education Commission Pakistan), WWF (Worldwide Fund for Nature) Pakistan. His research focus is deep learning and signal processing applications for environmental monitoring, with particular focus on underwater acoustics, and marine mammal conservation. He is a reviewer for professional journals such as Journal of Acoustical Society (America), IEEE Journal of Oceanic Engineering, IEEE Sensors Journal, Applied Acoustics, IEEE Transactions on Intelligent Transportation Systems. Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing.
Peng Ren is a full professor with the College of Oceanography and Space Informatics, China University of Petroleum (East China). He is the director of Qingdao International Research Center for Intelligent Forecast and Detection of Oceanic Catastrophes. He received the K. M. Scott Prize from the University of York, the Natural Science award (first rank) from China Institute of Electronics, and the Eduardo Caianiello Best Student Paper Award from 18th International Conference on Image Analysis and Processing as one co-author. He has served as an associate editor of IEEE Transactions on Geoscience and Remote Sensing. Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019.
Mohd Rizal Arshad is a full professor at the School of Electrical and Electronic Engineering at Universiti Sains Malaysia (USM), Malaysia, where he specializes in ocean robotics technology and intelligent system. He received his B.Eng. in Medical Electronics & Instrumentation and PhD in Electronic Engineering from University of Liverpool, UK in 1994 and 1999, respectively. He completed his MSc. in Electronic Control Engineering from the University of Salford, UK in Dec 1995. He has supervised many postgraduate students and published extensively in local and international publications. He is a senior member of the IEEE, and was awarded IEEE OES Presidential Award in 2019. Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles.
Itzik Klein is an Assistant Professor, heading the Autonomous Navigation and Sensor Fusion Lab, at the Charney School of Marine Sciences, Hatter Department of Marine Technologies, University of Haifa. He is an IEEE Senior Member and a member of the IEEE Journal of Indoor and Seamless Positioning and Navigation (J-ISPIN) Editorial Board. Prior to joining the University of Haifa, he worked at leading companies in Israel on navigation topics for more than 15 years. He has a wide range of experience in navigation systems and sensor fusion from both industry and academic perspectives. His research interests lie in the intersection of artificial intelligence with inertial sensing, sensor fusion, and autonomous underwater vehicles. John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988.
John R. Potter (IEEE M’94, SM’02, F’18) graduated in the previous century with a joint honours Mathematics and Physics Degree from Bristol and a PhD. in Glaciology and Oceanography from Cambridge, UK studying Antarctic ice mass balance, where he spent four consecutive summers. This work helped underscore the non-linear fragility of polar ice to climate change and led to him receiving the Polar Medal from Queen Elizabeth II in 1988. Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing.
Nick is a Visiting Fellow at the UK National Oceanographic Center, Southampton His nomination was endorsed by the Underwater Acoustics Technology Committee. He had worked as a Research Associate and Lecturer at University of Birmingham and has been working as a Research Scientist at the Applied Research Laboratory, University of Texas, Austin. He has also served as a Program Officer at the Office of Naval Research Global. He is a senior member of IEEE (OES) and a Fellow of Acoustical Society of America (ASA). Nick has also been serving as Assoc. Editor for IEEE JoE and JASA. He is widely acknowledged for his expertise are seabed acoustics, parametric array modeling, sonar beamformer, underwater signal processing. Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics.
Maurizio Migliaccio (M’91-SM’00-F’17) is Full professor of Electromagnetics at Università di Napoli Parthenope (Italy) and was Affiliated Full Professor at NOVA Southeastern University, Fort Lauderdale, FL (USA). He has been teaching Microwave Remote Sensing since 1994. He was visiting scientist at Deutsche Forschungsanstalt fur Lüft und Raumfahrt (DLR), Oberpfaffenhofen, Germany. He was member of the Italian Space Agency (ASI) scientific committee. He was member of the ASI CosmoSkyMed second generation panel. He was e-geos AdCom member. He was Italian delegate of the ESA PB-EO board. He was Member of South Africa Expert Review Panel for Space Exploration. He serves as reviewer for the UE, Italian Research Ministry (MIUR), NCST, Kazakhstan and Hong Kong Research board. He lectured in USA, Canada, Brazil, China, Hong Kong, Germany, Spain, Czech Republic, Switzerland and Italy. He was Italian delegate at UE COST SMOS Mode Action. He is listed in the Italian Top Scientists. He is an IEEE Trans. Geoscience and Remote Sensing AE, International Journal of Remote Sensing AE, and was IEEE Journal of Oceanic Engineering AE Special Issue on Radar for Marine and Maritime Remote Sensing, IEEE JSTARS AE of the Special Issue on CosmoSKyMed, Member of the Indian Journal of Radio & Space Physics Editorial board. His main current scientific interests cover SAR sea oil slick and man-made target monitoring, remote sensing for marine and coastal applications, remote sensing for agriculture monitoring, polarimetry, inverse problems for resolution enhancement, reverberating chambers. He published about 160 peer-reviewed journal papers on remote sensing and applied electromagnetics. He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration.
He has developed various types of Autonomous Underwater Vehicles (AUVs) and related application technologies including navigation methods, a new sensing method using a chemical sensor, precise seafloor mapping methods, a precise seabed positioning system with a resolution of a few centimeters, a new sensing system of the thickness of cobalt-rich crust; and more. He has shown, by using these technologies that AUVs are practicable and valuable tools for deep-sea exploration. Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida.
Donna Kocak has had an outstanding career in defense and scientific projects developing and applying solutions in subsea optics, imaging and robotics. She graduated with an M.Sc in Computer Science in 1997 from the University of Central Florida; an MBA in 2008 from the University of Florida; and M.Sc in Industrial Engineering in 2011 from the University of Central Florida. She is currently a Senior Scientist, Advanced Concepts Engineering, and Fellow at the Harris Corporation in Melbourne, Florida, where she has developed novel optical imaging and communication solutions for under-sea defense and scientific projects. Prior to 2008 Donna Kocak was Founder and President of Green Sky Imaging, LLC (GSI) who developed laser/video photogrammetry software for underwater inspection and survey. Her earlier career positions were with Naval Training Systems Center, Florida; Harbor Branch Oceanographic Institution, Florida; eMerge Interactive; and the Advanced Technologies Group in Florida. John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club.
John Potter has a Joint Honours degree in Mathematics and Physics from Bristol University in the UK and a PhD in Glaciology and Oceanography from the University of Cambridge on research in the Antarctic, for which he was awarded the Polar Medal in 1988. John has worked on polar oceanography, underwater acoustics, ambient noise (including imaging), marine mammals, communications, IoUT, autonomous vehicles and strategic development. He has 40 years’ international experience working at the British Antarctic Survey in the UK, NATO in Italy, SIO in California, NUS in Singapore and most recently at NTNU in Norway. John is a Fellow of the IEEE and MTS, an Associate Editor for the IEEE Journal of Oceanic Engineering, IEEE OES Distinguished Lecturer, PADI Master Scuba Diver Trainer & an International Fellow of the Explorer’s Club. Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications.
Dr. James V. Candy is the Chief Scientist for Engineering and former Director of the Center for Advanced Signal & Image Sciences at the University of California, Lawrence Livermore National Laboratory. Dr. Candy received a commission in the USAF in 1967 and was a Systems Engineer/Test Director from 1967 to 1971. He has been a Researcher at the Lawrence Livermore National Laboratory since 1976 holding various positions including that of Project Engineer for Signal Processing and Thrust Area Leader for Signal and Control Engineering. Educationally, he received his B.S.E.E. degree from the University of Cincinnati and his M.S.E. and Ph.D. degrees in Electrical Engineering from the University of Florida, Gainesville. He is a registered Control System Engineer in the state of California. He has been an Adjunct Professor at San Francisco State University, University of Santa Clara, and UC Berkeley, Extension teaching graduate courses in signal and image processing. He is an Adjunct Full-Professor at the University of California, Santa Barbara. Dr. Candy is a Fellow of the IEEE and a Fellow of the Acoustical Society of America (ASA) and elected as a Life Member (Fellow) at the University of Cambridge (Clare Hall College). He is a member of Eta Kappa Nu and Phi Kappa Phi honorary societies. He was elected as a Distinguished Alumnus by the University of Cincinnati. Dr. Candy received the IEEE Distinguished Technical Achievement Award for the “development of model-based signal processing in ocean acoustics.” Dr. Candy was selected as a IEEE Distinguished Lecturer for oceanic signal processing as well as presenting an IEEE tutorial on advanced signal processing available through their video website courses. He was nominated for the prestigious Edward Teller Fellowship at Lawrence Livermore National Laboratory. Dr. Candy was awarded the Interdisciplinary Helmholtz-Rayleigh Silver Medal in Signal Processing/Underwater Acoustics by the Acoustical Society of America for his technical contributions. He has published over 225 journal articles, book chapters, and technical reports as well as written three texts in signal processing, “Signal Processing: the Model-Based Approach,” (McGraw-Hill, 1986), “Signal Processing: the Modern Approach,” (McGraw-Hill, 1988), “Model-Based Signal Processing,” (Wiley/IEEE Press, 2006) and “Bayesian Signal Processing: Classical, Modern and Particle Filtering” (Wiley/IEEE Press, 2009). He was the General Chairman of the inaugural 2006 IEEE Nonlinear Statistical Signal Processing Workshop held at the Corpus Christi College, University of Cambridge. He has presented a variety of short courses and tutorials sponsored by the IEEE and ASA in Applied Signal Processing, Spectral Estimation, Advanced Digital Signal Processing, Applied Model-Based Signal Processing, Applied Acoustical Signal Processing, Model-Based Ocean Acoustic Signal Processing and Bayesian Signal Processing for IEEE Oceanic Engineering Society/ASA. He has also presented short courses in Applied Model-Based Signal Processing for the SPIE Optical Society. He is currently the IEEE Chair of the Technical Committee on “Sonar Signal and Image Processing” and was the Chair of the ASA Technical Committee on “Signal Processing in Acoustics” as well as being an Associate Editor for Signal Processing of ASA (on-line JASAXL). He was recently nominated for the Vice Presidency of the ASA and elected as a member of the Administrative Committee of IEEE OES. His research interests include Bayesian estimation, identification, spatial estimation, signal and image processing, array signal processing, nonlinear signal processing, tomography, sonar/radar processing and biomedical applications. Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S.
Kenneth Foote is a Senior Scientist at the Woods Hole Oceanographic Institution. He received a B.S. in Electrical Engineering from The George Washington University in 1968, and a Ph.D. in Physics from Brown University in 1973. He was an engineer at Raytheon Company, 1968-1974; postdoctoral scholar at Loughborough University of Technology, 1974-1975; research fellow and substitute lecturer at the University of Bergen, 1975-1981. He began working at the Institute of Marine Research, Bergen, in 1979; joined the Woods Hole Oceanographic Institution in 1999. His general area of expertise is in underwater sound scattering, with applications to the quantification of fish, other aquatic organisms, and physical scatterers in the water column and on the seafloor. In developing and transitioning acoustic methods and instruments to operations at sea, he has worked from 77°N to 55°S. René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC.
René Garello, professor at Télécom Bretagne, Fellow IEEE, co-leader of the TOMS (Traitements, Observations et Méthodes Statistiques) research team, in Pôle CID of the UMR CNRS 3192 Lab-STICC. Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar.
Professor Mal Heron is Adjunct Professor in the Marine Geophysical Laboratory at James Cook University in Townsville, Australia, and is CEO of Portmap Remote Ocean Sensing Pty Ltd. His PhD work in Auckland, New Zealand, was on radio-wave probing of the ionosphere, and that is reflected in his early ionospheric papers. He changed research fields to the scattering of HF radio waves from the ocean surface during the 1980s. Through the 1990s his research has broadened into oceanographic phenomena which can be studied by remote sensing, including HF radar and salinity mapping from airborne microwave radiometers . Throughout, there have been one-off papers where he has been involved in solving a problem in a cognate area like medical physics, and paleobiogeography. Occasionally, he has diverted into side-tracks like a burst of papers on the effect of bushfires on radio communications. His present project of the Australian Coastal Ocean Radar Network (ACORN) is about the development of new processing methods and applications of HF radar data to address oceanography problems. He is currently promoting the use of high resolution VHF ocean radars, based on the PortMap high resolution radar. Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards.
Hanu Singh graduated B.S. ECE and Computer Science (1989) from George Mason University and Ph.D. (1995) from MIT/Woods Hole.He led the development and commercialization of the Seabed AUV, nine of which are in operation at other universities and government laboratories around the world. He was technical lead for development and operations for Polar AUVs (Jaguar and Puma) and towed vehicles(Camper and Seasled), and the development and commercialization of the Jetyak ASVs, 18 of which are currently in use. He was involved in the development of UAS for polar and oceanographic applications, and high resolution multi-sensor acoustic and optical mapping with underwater vehicles on over 55 oceanographic cruises in support of physical oceanography, marine archaeology, biology, fisheries, coral reef studies, geology and geophysics and sea-ice studies. He is an accomplished Research Student advisor and has made strong collaborations across the US (including at MIT, SIO, Stanford, Columbia LDEO) and internationally including in the UK, Australia, Canada, Korea, Taiwan, China, Japan, India, Sweden and Norway. Hanu Singh is currently Chair of the IEEE Ocean Engineering Technology Committee on Autonomous Marine Systems with responsibilities that include organizing the biennial IEEE AUV Conference, 2008 onwards. Associate Editor, IEEE Journal of Oceanic Engineering, 2007-2011. Associate editor, Journal of Field Robotics 2012 onwards. Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award.
Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of electrical and computer engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Milica’s research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. She has made pioneering contributions to underwater acoustic communications, and her work has been widely cited. She is a Fellow of the IEEE, and serves as an Associate Editor for its Journal of Oceanic Engineering (and in the past for Transactions on Signal Processing and Transactions on Vehicular Technology). She also serves on the Advisory Board of the IEEE Communication Letters, and chairs the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award. Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.
Dr. Paul C. Hines was born and raised in Glace Bay, Cape Breton. From 1977-1981 he attended Dalhousie University, Halifax, Nova Scotia, graduating with a B.Sc. (Hon) in Engineering-Physics.